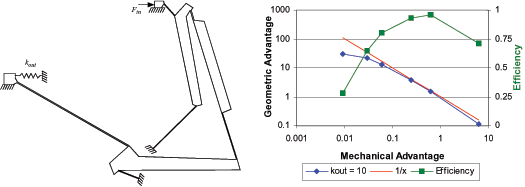
In many MEMS applications, it is desirable to amplify the force or displacement of an actuator or transducer. Devices that amplify force or mechanical advantage typically achieve this at the expense of displacement or geometric advantage. Likewise, devices that amplify geometric advantage do so at the expense of mechanical advantage. This paper proposes a device topology based on a four-link mechanism with compliant segments in place of hinges. Finite-element analysis and optimization were used to develop a Pareto set of solutions quantifying the force / displacement trade-off for a variety of loading conditions. Depending on these conditions, this device is capable of multiplying force inputs by as much as 23.7 and displacement inputs by as much as 588. Efficiency of these designs improves as the two objectives (mechanical and geometric advantage) are considered jointly in a multicriteria optimization problem rather than individually.
