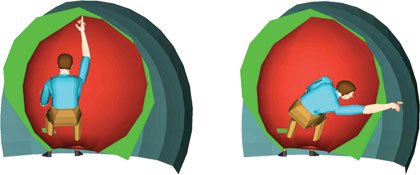
Assessments of reach capability using human figure models are commonly performed by exercising each joint of a kinematic chain, terminating in the hand, through the associated ranges of motion. The result is a reach envelope determined entirely by the segment lengths, joint degrees of freedom, and joint ranges of motion. In this paper, the validity of this approach is assessed by comparing the reach envelopes obtained by this method to those obtained in a laboratory study of men and women. Figures were created in the Jack human modeling software to represent the kinematic linkages of participants in the laboratory study. Maximum reach was predicted using the software’s kinematic reach-envelope generation methods and by interactive manipulation. Predictions were compared to maximum reach envelopes obtained experimentally. The findings indicate that several changes to the normal procedures for obtaining maximum reach envelopes for seated tasks are needed. Accurate prediction of maximum seated reach requires consideration of balance and pelvis mobility, neither of which is closely linked to joint range of motion. Sufficient ranges of motion in the shoulder and torso are also needed to represent postures near maximum reach.
